тело подвешено на неподвижной опоре так, что оно свободно качается вперед и назад под действием силы тяжести
Маятник представляет собой тело отстранен от фиксированной опоры так , чтобы он свободно поворачивается вперед и назад под действием силы тяжести. Когда маятник смещается в сторону от своего положения покоя, равновесия, он подвергается действию возвращающей силы из-за силы тяжести, которая ускоряет его обратно к положению равновесия. При отпускании восстанавливающая сила, действующая на массу маятника, заставляет его колебаться около положения равновесия, раскачивая его назад и вперед. Математика маятников в целом довольно сложна. Можно сделать упрощающие предположения, которые в случае простого маятника позволяют аналитически решать уравнения движения для малоугловых колебаний.
Простой гравитационный маятник
Простой тяжести маятника это идеализированная математическая модель реального маятника. Это груз (или боб ) на конце безмассового шнура, подвешенного на оси без трения . Поскольку в этой модели нет потерь энергии на трение, при начальном смещении он будет качаться вперед и назад с постоянной амплитудой . Модель основана на следующих предположениях:
- Удочка или шнур, на котором качается боб, не имеет массы, не растягивается и всегда остается натянутым.
- Боб - это точечная масса.
- Движение происходит только в двух измерениях , т. Е. Боб имеет не эллипс, а дугу .
- Движение не теряет энергию на трение или сопротивление воздуха .
- Гравитационное поле однородно.
- Опора не двигается.
Дифференциальное уравнение , которое представляет собой движение простого маятника
-
 Уравнение 1
Уравнение 1
где г есть величина в гравитационном поле , ℓ длина стержня или шнура, а θ представляет собой угол от вертикали к маятнику.

Рисунок 1. Силовая диаграмма простого гравитационного маятника.
Рассмотрим рисунок 1 справа, на котором показаны силы, действующие на простой маятник. Обратите внимание, что путь маятника образует дугу окружности. Угол θ измеряется в радианах , и это очень важно для данной формулы. Синяя стрелка - это сила тяжести, действующая на боб, а фиолетовые стрелки - это та же сила, разделенная на составляющие, параллельные и перпендикулярные мгновенному движению боба. Направление мгновенной скорости боба всегда указывает вдоль красной оси, которая считается тангенциальной осью, потому что ее направление всегда касается окружности. Рассмотрим второй закон Ньютона ,

где Р есть сумма сил , действующих на объекте, т есть масса, а ускорение. Поскольку нас интересуют только изменения скорости, и поскольку боб вынужден оставаться на круговой траектории, мы применяем уравнение Ньютона только к тангенциальной оси. Короткая фиолетовая стрелка представляет компонент гравитационной силы по касательной оси, и тригонометрия может использоваться для определения ее величины. Таким образом,

где g - ускорение свободного падения у поверхности земли. Отрицательный знак в правой части означает, что θ и a всегда направлены в противоположные стороны. Это имеет смысл, потому что, когда маятник движется дальше влево, мы ожидаем, что он снова ускорится вправо.
Это линейное ускорение a вдоль красной оси может быть связано с изменением угла θ формулами длины дуги; s - длина дуги:

таким образом:

|
Уравнение (1) можно получить, используя два определения крутящего момента.

Сначала начните с определения крутящего момента на маятнике с помощью силы тяжести.

где l - вектор длины маятника, а F g - сила тяжести.
А пока просто подумайте о величине крутящего момента на маятнике.

где m - масса маятника, g - ускорение свободного падения, l - длина маятника, а θ - угол между вектором длины и силой тяжести.
Затем перепишите угловой момент.

Опять же, просто рассмотрите величину углового момента.

и его производная по времени

Согласно τ =
d L/dt, мы можем получить, сравнивая величины

таким образом:

что является тем же результатом, что и при силовом анализе.
|

Рис. 2. Тригонометрия простого гравитационного маятника.
Его также можно получить с помощью принципа сохранения механической энергии : любой объект, падающий на вертикальное расстояние , приобретет кинетическую энергию, равную той, которую он потерял при падении. Другими словами, гравитационная потенциальная энергия преобразуется в кинетическую энергию. Изменение потенциальной энергии определяется выражением


Изменение кинетической энергии (тело стартовало из состояния покоя) определяется выражением

Поскольку энергия не теряется, выигрыш в одном должен быть равен потерям в другом.

Изменение скорости при заданном изменении высоты можно выразить как

Используя приведенную выше формулу длины дуги, это уравнение можно переписать в виде dθ/dt:

где h - вертикальное расстояние, на которое маятник упал. Посмотрите на рисунок 2, на котором представлена тригонометрия простого маятника. Если маятник начинает качаться с некоторого начального угла θ 0 , тогда y 0 , вертикальное расстояние от винта, определяется как

Аналогично для y 1 имеем

Тогда h - это разница двух

С точки зрения dθ/dt дает
-
 Уравнение 2 Уравнение 2
Это уравнение известно как первый интеграл движения , оно дает скорость с точки зрения местоположения и включает постоянную интегрирования, относящуюся к начальному смещению ( θ 0 ). Мы можем дифференцировать, применяя цепное правило , относительно времени, чтобы получить ускорение

что является тем же результатом, что и при силовом анализе.
|
Малоугловое приближение

Малоугловое приближение для синусоидальной функции: при
θ ≈ 0 находим
sin θ ≈ θ .
Приведенное выше дифференциальное уравнение нелегко решить, и не существует решения, которое можно было бы записать в терминах элементарных функций. Однако добавление ограничения на размер амплитуды колебаний дает форму, решение которой можно легко получить. Если предполагается, что угол намного меньше 1 радиана (часто упоминается как менее 0,1 радиана, около 6 °), или

затем подставив sin θ в уравнение. 1 с использованием малоуглового приближения ,

дает уравнение для гармонического осциллятора ,

Ошибка из-за аппроксимации имеет порядок θ 3 (из разложения Тейлора для sin θ ).
Пусть начальный угол равен θ 0 . Если предположить, что маятник выпущен с нулевой угловой скоростью , решение принимает вид

Движение представляет собой простое гармоническое движение, где θ 0 - амплитуда колебаний (то есть максимальный угол между стержнем маятника и вертикалью). Соответствующий приблизительный период движения тогда равен

который известен как закон Христиана Гюйгенса для того периода. Отметим, что в малоугловом приближении период не зависит от амплитуды θ 0 ; это свойство изохронизма, которое открыл Галилей .
Эмпирическое правило длины маятника
-
 можно выразить как
можно выразить как 
Если используются единицы СИ (т. Е. Измерения в метрах и секундах) и предполагается, что измерение происходит на поверхности Земли, то g ≈ 9,81 м / с 2 , играмм/π 2≈ 1 (0,994 - это приближение к 3 десятичным знакам).
Следовательно, относительно разумные приближения для длины и периода:

где T 0 - количество секунд между двумя ударами (по одному удару для каждой стороны замаха), а l измеряется в метрах.
Период произвольной амплитуды
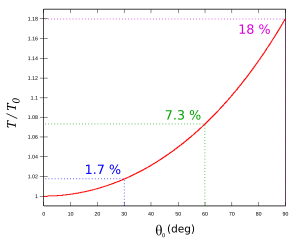
Рис. 3. Отклонение «истинного» периода маятника от малоуглового приближения периода. «Истинное» значение было получено путем численной оценки эллиптического интеграла.

Рисунок 4. Относительные ошибки с использованием степенного ряда за период.
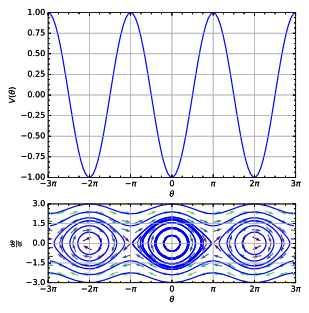
Рисунок 5. Потенциальная энергия и
фазовый портрет простого маятника. Обратите внимание, что ось
x , будучи углом, накручивается на себя через каждые 2
π радиан.
Для амплитуд, выходящих за рамки приближения малого угла , можно вычислить точный период, сначала обратив уравнение для угловой скорости, полученное с помощью энергетического метода ( уравнение 2 ),

а затем интегрирование в течение одного полного цикла,

или вдвое больше полупериода

или в четыре раза больше четверти цикла

что приводит к

Обратите внимание, что этот интеграл расходится при приближении θ 0 к вертикали.

так что маятник с нужной энергией, чтобы двигаться вертикально, никогда не доберется туда. (И наоборот, маятник, близкий к своему максимуму, может упасть сколь угодно долго.)
Этот интеграл можно переписать в терминах эллиптических интегралов как

где F - неполный эллиптический интеграл первого рода, определяемый формулой

Или, короче, заменой

выражая θ через u ,
 Уравнение 3
Уравнение 3
Здесь K - полный эллиптический интеграл первого рода, определяемый формулой

Для сравнения приближения с полным решением рассмотрим период маятника длиной 1 м на Земле ( g =9.806 65 м / с 2 ) при начальном угле 10 град.

Линейное приближение дает

Разница между двумя значениями, менее 0,2%, намного меньше, чем разница между g в зависимости от географического положения.
Отсюда есть много способов перейти к вычислению эллиптического интеграла.
Полиномиальное решение Лежандра для эллиптического интеграла
Учитывая уравнение. 3 и решение полинома Лежандра для эллиптического интеграла:

где н !! обозначает двойной факториал , точное решение периода простого маятника:

На рисунке 4 показаны относительные ошибки с использованием степенного ряда. T 0 - это линейное приближение, а от T 2 до T 10 включают соответственно члены до 2-й и 10-й степеней.
Решение степенного ряда для эллиптического интеграла
Другая формулировка вышеуказанного решения может быть найдена, если следующий ряд Маклорена:

используется в решении полинома Лежандра выше. Результирующий степенной ряд:
-
 ,
,
другие фракции доступны в OEIS : A223067 OEIS : A223068 .
Среднее арифметико-геометрическое решение для эллиптического интеграла
Учитывая уравнение. 3 и среднее арифметико-геометрическое решение эллиптического интеграла:

где M ( x , y ) - среднее арифметико-геометрическое x и y .
Это дает альтернативную формулу для периода, которая быстрее сходится:

Первая итерация этого алгоритма дает

Это приближение имеет относительную погрешность менее 1% для углов до 96,11 градуса. Поскольку выражение можно записать более кратко как


Разложение второго порядка сводится к

Вторая итерация этого алгоритма дает

Это второе приближение имеет относительную погрешность менее 1% для углов до 163,10 градуса.
Приближенные формулы для периода нелинейного маятника
Хотя точный период может быть определен для любой конечной амплитуды rad путем вычисления соответствующего полного эллиптического интеграла , где этого часто избегают в приложениях, поскольку невозможно выразить этот интеграл в замкнутой форме в терминах элементарных функций. Это дало возможность исследовать простые приближенные формулы увеличения периода маятника с амплитудой (полезные во вводных физических лабораториях, классической механике, электромагнетизме, акустике, электронике, сверхпроводимости и т. Д.). Приближенные формулы, найденные разными авторами, можно классифицировать как следует:




- Формулы «не очень большого угла», то есть те, которые дают хорошие оценки для амплитуд ниже рад (естественный предел для боба на конце гибкой струны), хотя отклонение относительно точного периода монотонно увеличивается с амплитудой, что неприемлемо для амплитуд, близких к рад. Одна из простейших формул, встречающихся в литературе, - это следующая формула Лимы (2006):, где .




- Формулы «очень больших углов», то есть те, которые аппроксимируют точный период асимптотически для амплитуд, близких к рад, с ошибкой, которая монотонно увеличивается для меньших амплитуд (т.е. непригодна для малых амплитуд). Одним из лучших таких формул является то , что по Кромеру, а именно: .

Конечно, увеличение с амплитудой более очевидно, когда , как это наблюдалось во многих экспериментах, использовался либо жесткий стержень, либо диск. Поскольку точные таймеры и датчики в настоящее время доступны даже в начальных физических лабораториях, экспериментальные ошибки, обнаруженные в экспериментах с `` очень большими углами '', уже достаточно малы для сравнения с точным периодом и очень хорошее согласие между теорией и экспериментами, в которых трение было обнаружено незначительное. Поскольку эта деятельность поощрялась многими инструкторами, была предпринята попытка найти простую приближенную формулу для периода маятника, действительную для всех возможных амплитуд, с которой можно было бы сравнить экспериментальные данные. В 2008 году Лима вывела формулу средневзвешенного значения с такой характеристикой:

 ,
,
где максимальная погрешность составляет всего 0,6% (при ).


Ряд Фурье для углового смещения произвольной амплитуды
Разложение в ряд Фурье дается выражением


где есть эллиптическая нома , и угловая частота.



Если определить

можно аппроксимировать с помощью разложения

(см. OEIS : A002103 ). Обратите внимание, что у нас есть , таким образом, приближение применимо даже для больших амплитуд.

Примеры
Анимация ниже изображает движение простого (без трения) маятника с увеличивающейся величиной начального смещения боба или эквивалентным увеличением начальной скорости. Небольшой график над каждым маятником - это соответствующая диаграмма фазовой плоскости ; горизонтальная ось - смещение, а вертикальная ось - скорость. При достаточно большой начальной скорости маятник не колеблется вперед и назад, а полностью вращается вокруг оси.
Начальный угол 0 °, устойчивое равновесие
Начальный угол 180 °, неустойчивое равновесие
Маятник с едва достаточной энергией для полного раскачивания
Маятник с достаточной энергией для полного раскачивания
Составной маятник
Соединение маятник (или физический маятник ) , где один стержень не безмассов, и может иметь расширенный размер; то есть твердое тело произвольной формы, качающееся на оси. В этом случае период маятника зависит от его момента инерции I вокруг точки поворота.
Уравнение крутящего момента дает:

куда:
-
α - угловое ускорение.
-
τ - крутящий момент
Крутящий момент создается под действием силы тяжести, поэтому:

куда:
-
m - масса тела
-
L - расстояние от оси до центра масс объекта.
-
θ - угол от вертикали
Следовательно, в малоугловом приближении sin θ ≈ θ ,

где I - момент инерции тела относительно точки поворота.
Выражение для α имеет ту же форму, что и обычный простой маятник, и дает период

И частота

Если принять во внимание начальный угол (для больших амплитуд), то выражение для принимает вид:


и дает период:

где θ 0 - максимальный угол колебания (относительно вертикали), а K ( k ) - полный эллиптический интеграл первого рода .
Физическая интерпретация воображаемого периода
Якобиан эллиптической функция , которая выражает позицию маятника как функция времени является двукратно периодической функцией с реальным периодом и воображаемым периодом. Реальный период - это, конечно, время, за которое маятник проходит один полный цикл. Пол Аппель указал на физическую интерпретацию мнимого периода: если θ 0 - максимальный угол одного маятника, а 180 ° - θ 0 - максимальный угол другого, то реальный период каждого - это величина мнимого периода маятника. Другие.
Спаренная маятник
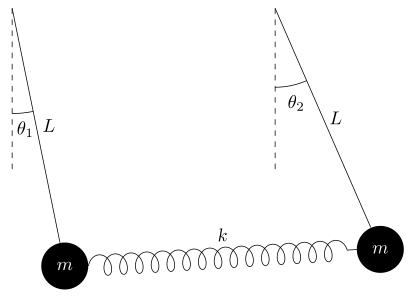
Два одинаковых простых маятника, соединенных пружиной, соединяющей бобышки.
Связанные маятники могут влиять на движение друг друга либо через соединение направления (например, пружина, соединяющая бобы), либо посредством движений в опорной конструкции (например, на поверхности стола). Уравнения движения двух идентичных простых маятников, соединенных пружиной, соединяющей опоры, можно получить с помощью лагранжевой механики .
Кинетическая энергия системы составляет:

где - масса бобов, - длина струн , - угловые смещения двух бобов из положения равновесия.




Потенциальная энергия системы:

где - ускорение свободного падения , а - жесткость пружины . Смещение пружины из положения равновесия предполагает приближение малого угла .



Тогда лагранжиан равен

что приводит к следующей системе связанных дифференциальных уравнений:

Сложение и вычитание этих двух уравнений по очереди и применение приближения малых углов дает два уравнения гармонического осциллятора в переменных и :



с соответствующими решениями

куда

и , , , являются постоянные интегрирования .



Выражение решений в терминах и в одиночку:

Если бобы не получают начального толчка, то условие требует , что дает (после некоторой перестановки):



Смотрите также
использованная литература
дальнейшее чтение
внешние ссылки